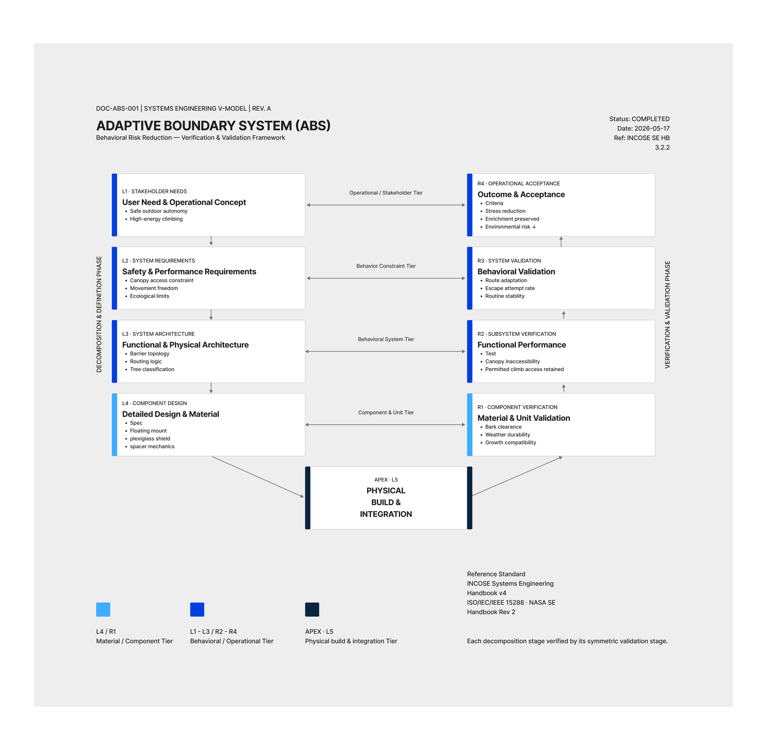
Adaptive Boundary System (ABS)
This self-initiated case study explores how systems engineering principles can be applied to real-world behavioral risk problems outside traditional digital interfaces.
The project focuses on reducing high-risk canopy traversal in domestic cats through behavioral observation, constraint-driven adaptation, and passive environmental safety architecture.
Goal
Problem
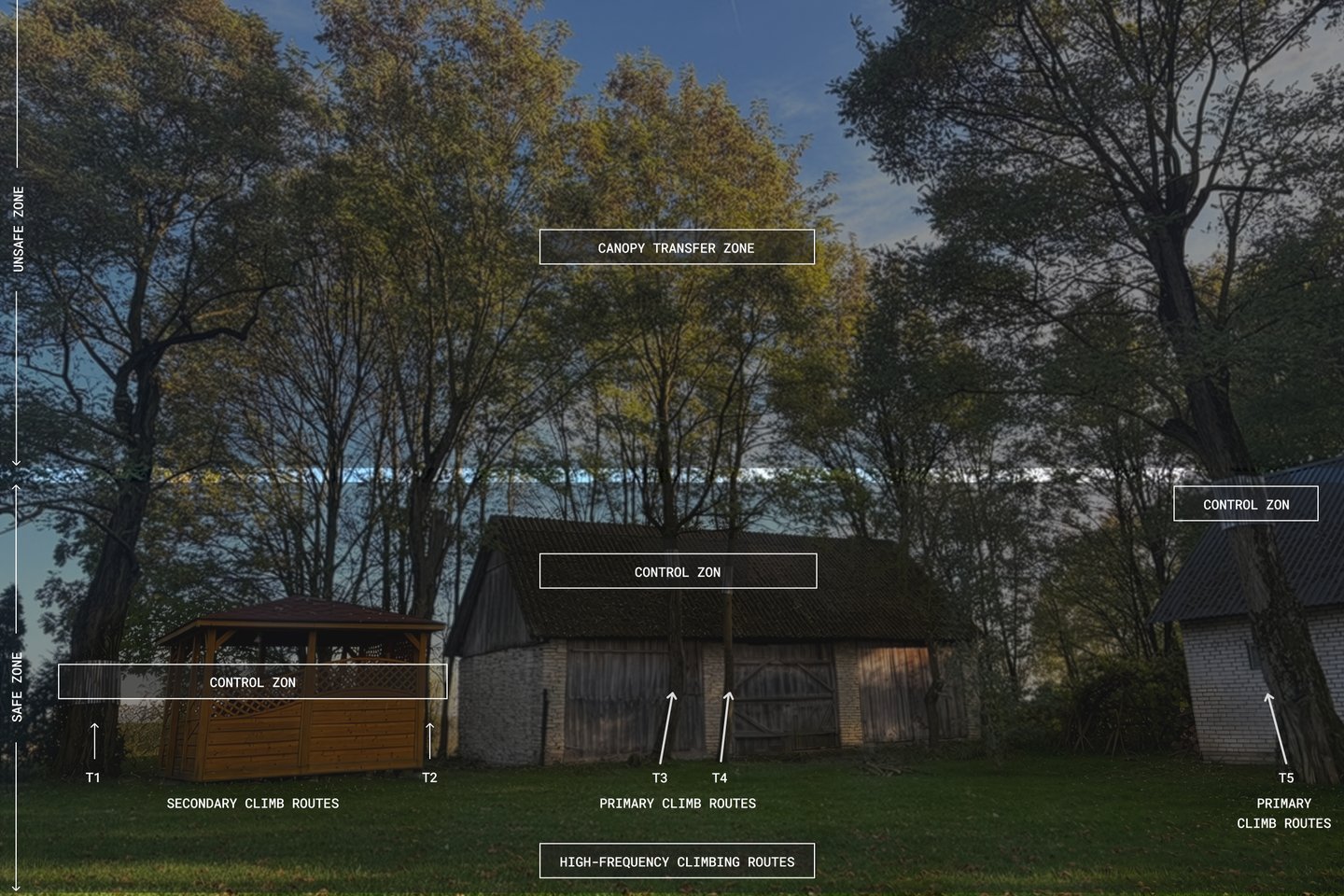
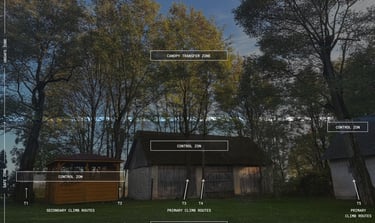
Context
rural environment,
high vertical structures,
unrestricted tree access,
high-risk traversal behavior.
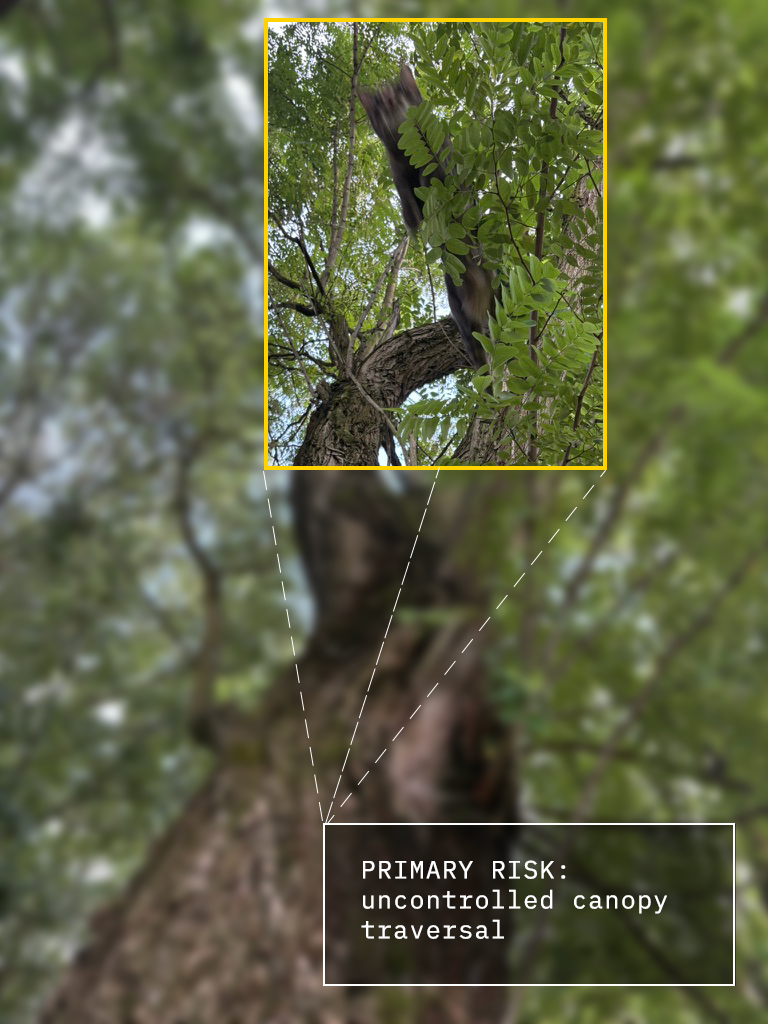
Pre-intervention uncontrolled canopy access.
High-altitude unstable branch area.
Constraints
no market-ready solutions,
non-invasive mounting required,
tree growth preservation,
multiple tree types,
varying canopy topology,
user behavioral persistence,
environmental aesthetics,
maintenance simplicity.
Risk Analysis
Safe
Controlled trunk climbing
Natural movement within stable boundaries.
Needs Monitoring
Branch transitions near fence lines or unstable surfaces.
Critical Risk
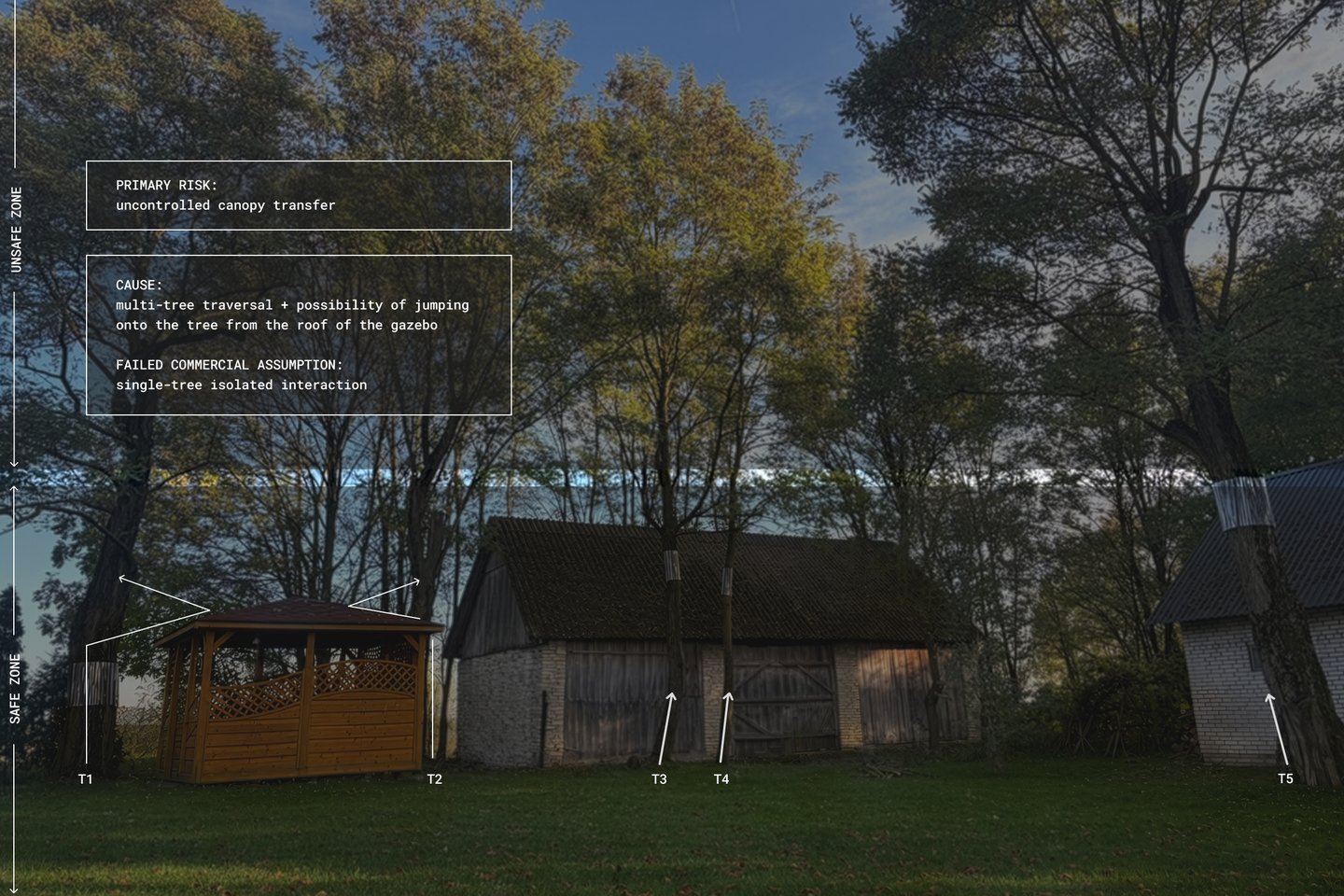
Uncontrolled canopy traversal on unstable branches.
Natural climbing
(trunk movement)
Danger zone
(unstable canopy traversal)
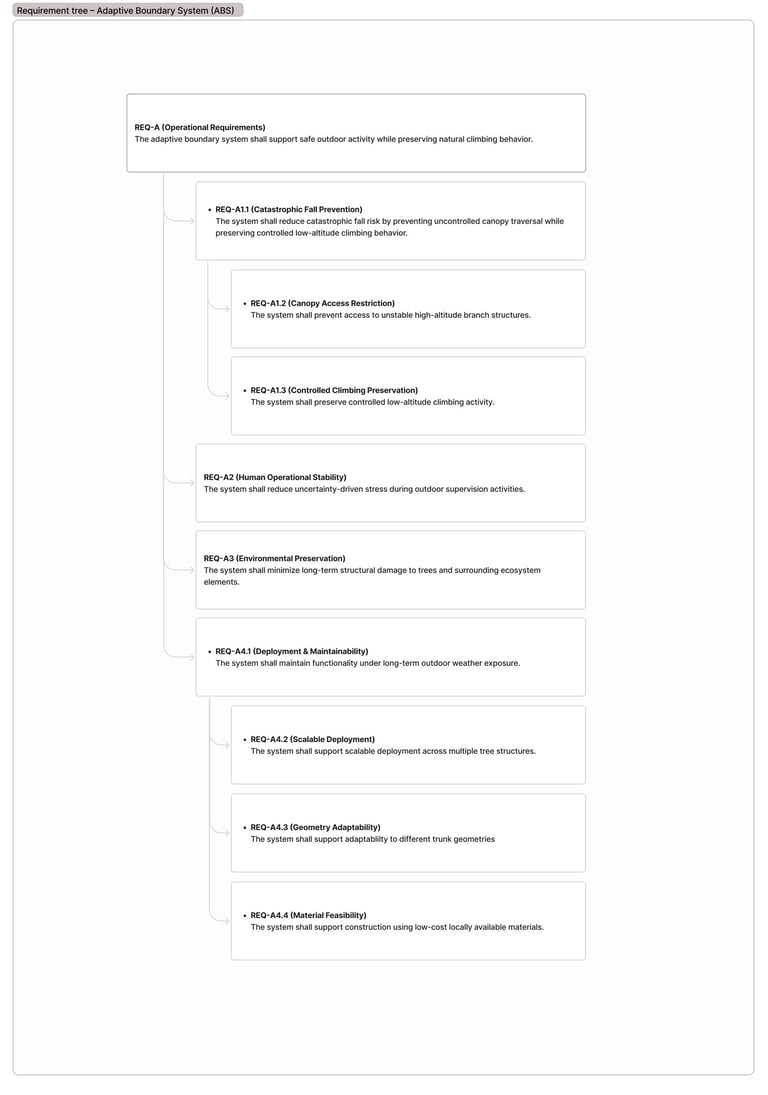
Behavioral risk analysis was decomposed into verifiable system architecture and validation logic.
Design adaptation
Existing commercial concepts were used as reference points rather than direct implementations.
However, deployment conditions introduced additional environmental and installation constraints:
irregular mature tree geometry, uncertain trunk dimensions at installation height, limited access conditions, and the need for low-cost scalable deployment.
Adaptation strategy
flexible plexiglass geometry allowing on-site dimensional adjustment,
distributed spacer-based mounting reducing localized structural pressure,
locally sourced low-cost materials,
modular attachment logic adaptable to irregular tree growth patterns,
installation tolerance under incomplete pre-measurement conditions.
Material is consequence of system constraints.
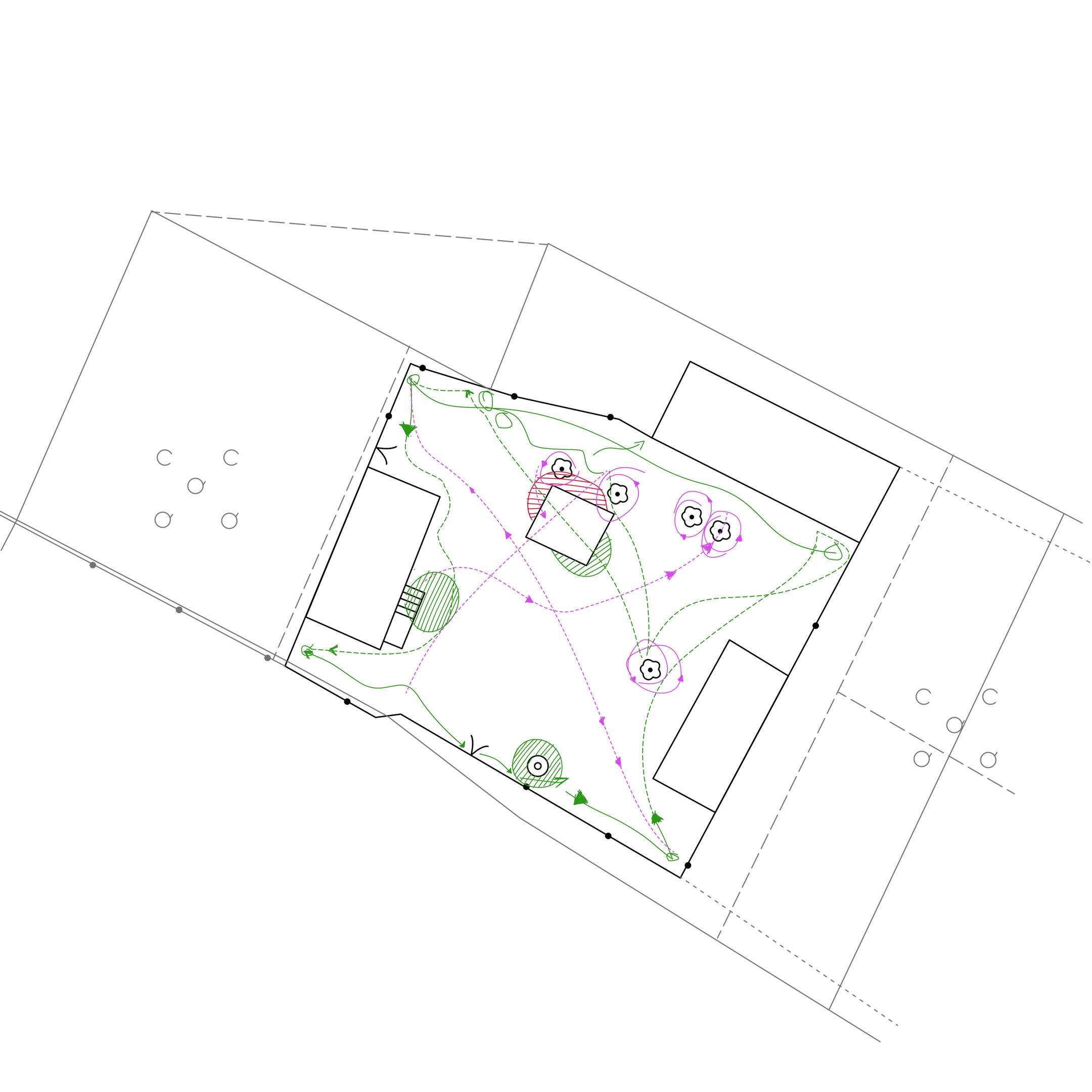
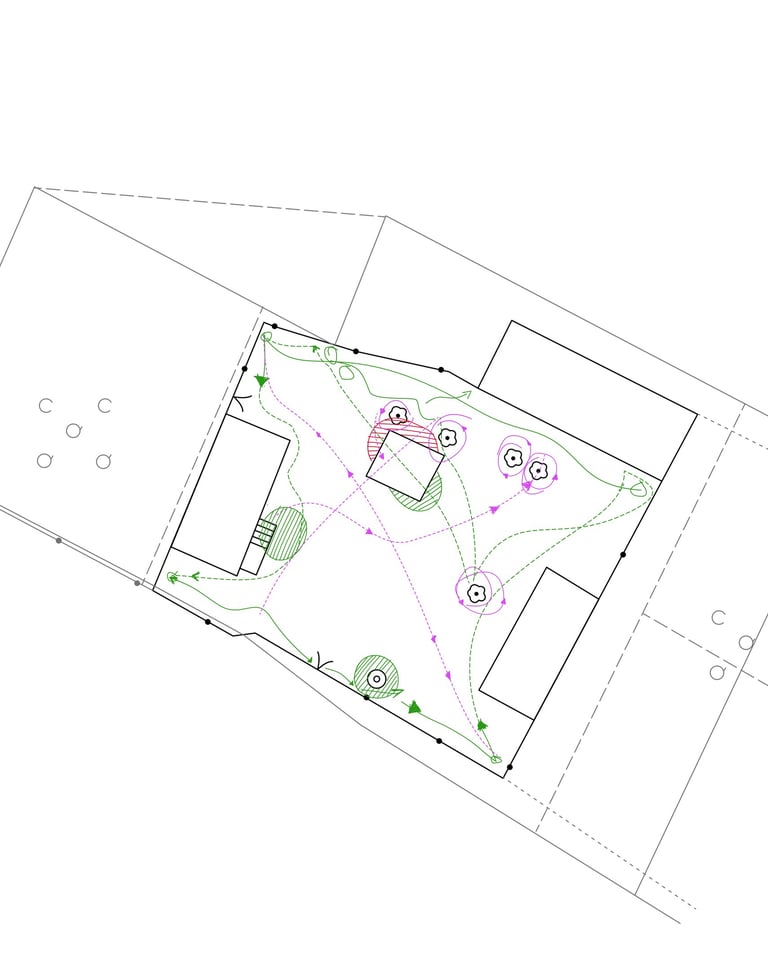
Behavioral
Observation
The subject treated the environment as an interconnected traversal network rather than isolated tree structures.
Repeated patterns included:
high-frequency reuse of specific climb routes,
opportunistic transitions between nearby structures,
and strong preference for elevated observation positions.
Following ABS implementation, behavior shifted toward:
controlled climbing,
repeated use of designated safe routes,
and voluntary return from boundary points without escalation into unsafe canopy traversal.


The system preserved natural climbing behavior while significantly reducing catastrophic-risk movement patterns.






Mechanism
Repeated traversal produced visible environmental wear patterns, confirming preferred route reuse.
BEHAVIOR LOGIC
• Patrol perimeter
• Check trees (climb / observe)
• Orbit & inspect
• Cross-yard zoomie bursts
• Rest & observe
• Repeat
NOTES
Zoomie mode triggered in open space
• Trees = high value points
• Corners = pivot points
• Safety perimeter always revisited


No observed re-entry into previously identified high-risk canopy traversal zones following ABS implementation.
Metrics
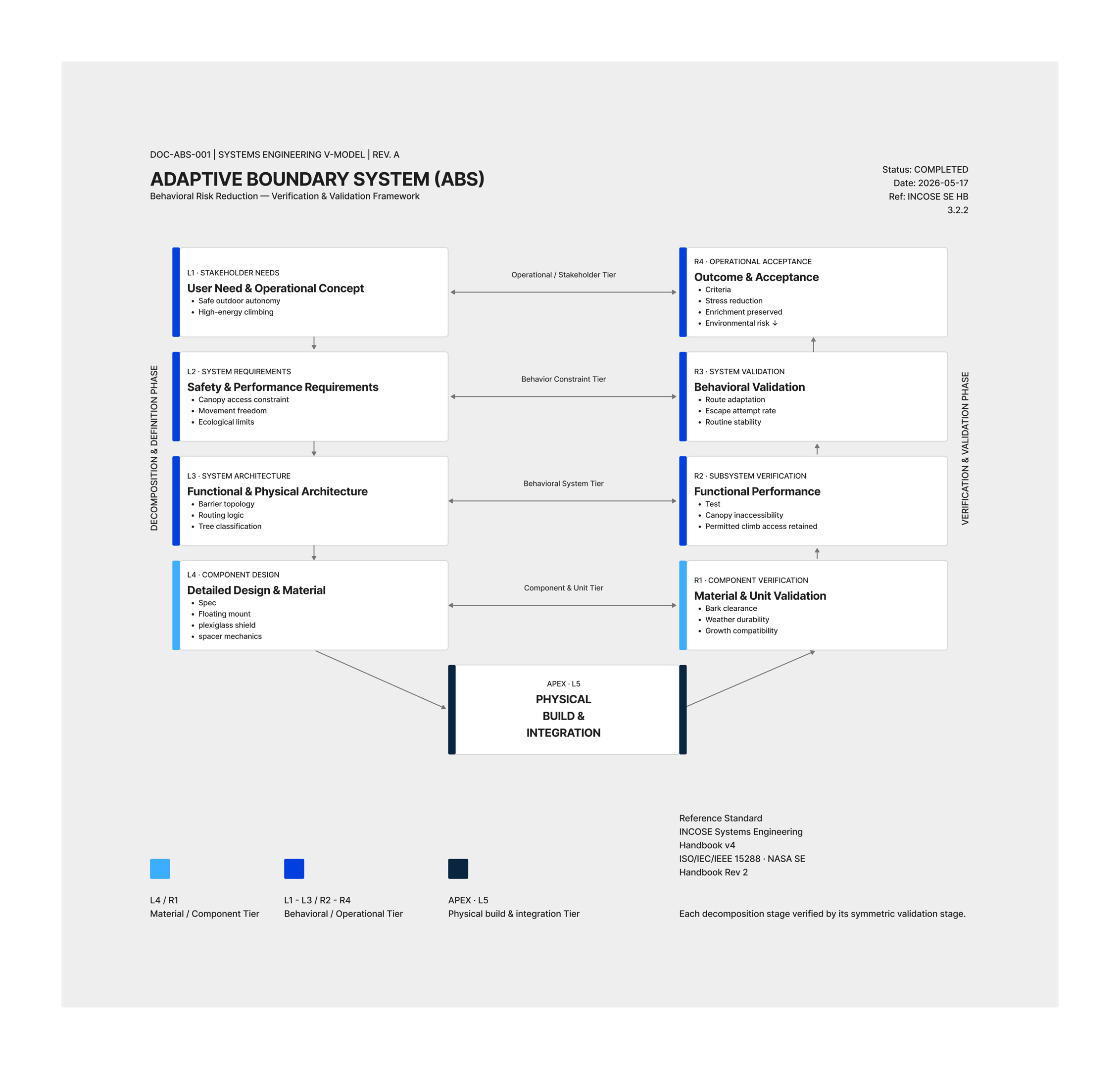
System
Architecture
Open full interactive model in Figma.
No Figma login required.
You can zoom and move around the board to inspect the system map.

The goal was not behavior elimination, but safe behavioral accommodation.
Ethics
Designing systems that remain usable under real human constraints.